Camera motion can improve the performance of a vision system in several ways, such as:
For this project, only the first two uses listed are exploited. The currently available hardware and processing resources on the personal computer do not allow optical-flow-based visual servoing, stereo vision, or sophisticated shape recognition to be performed in real-time. This chapter will present simple control strategies for basic active vision tasks of importance in human-computer interaction, namely, looking toward sounds, following faces, and following motion.
Two types of camera motion, analogous to biological eye movements, apply to this project: saccadic movement and servo motion. Saccadic eye movement involves rapid change in eye orientation to a new target angle, with negligible visual processing occurring during the motion. Such behavior would be desirable for this system in the case of sudden detection of a sound outside the camera field of view when no other targets are in sight. Servo motion involves fixation on a moving target and matching its trajectory with corresponding eye motion. In a surveillance application, this would be desirable for following a subject walking through a scene. In videoconferencing, however, the desired camera behavior may be to provide a stable camera gaze despite small motions of the current speaker, using slower, more conservative camera motions to compensate for these shifts.
In order to detect features such as skin tone in an image, the camera must have an appropriate zoom setting to make the target large enough in the image to detect, yet small enough to determine its boundaries. Depending on target range, the optimum zoom setting may change. If the system should need to visually search for targets, a wider zoom will facilitate this by covering a larger area of the room. On the other hand, if the system needs to improve its estimation of given target's position, it may zoom in to provide a closer view. Zoom behavior will therefore be a dynamic function of the system's confidence in which targets are of interest and where they may be.
As mentioned previously, not all of the system's perception goals can be met simultaneously. Sensing tasks must serialize their access to sensing resources, deciding how and when to move the camera, or what algorithms to use. One cannot perform motion detection, for example, while moving the camera. (See Footnote 5) In addition, the proximity of the pan-tilt camera to the microphones may cause interference with the sound localization task due to motor noise. (See Footnote 6) Table 2 outlines conflicts between sensing tasks and camera behaviors:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
The system behavior must be able to switch between sensing tasks in order to avoid starving the system for any vital piece of information. Also, concurrent sensing tasks must be made aware of what the camera is doing, in order to avoid making erroneous measurements when this action is incompatible with its sensing needs. For example, during camera motion the sound localization computations must be disabled if the camera motors are loud enough to interfere with the localization process. This task is made easier by the fact that sensing and control processes operate on the same platform, which allows them to share as much data as they need and gives them very high registration in time.
Inputs to camera control behaviors may include both acoustic and visual information provided by the sensor processing stages described previously. Acoustic data may include:
Data extracted from the visual tracking and filtering operations may include:
All of this information may useful when developing control actions for following conversations and exploring activities.
The Canon VC-C1 camera allows software control of its pan, tilt, and zoom positions via an RS-232C serial communications link. The camera does not allow simultaneous pan and tilt motions; any change in position requires two separate movements. This hampers the fluidity of motion that might otherwise be incorporated into a camera servo-control scheme. Another limitation is the lack of explicit servo-control commands. The camera accepts commands to move to a specific position, report the current position, turn on an axis (continuously) in one direction or the other, and change motor speed. A computer program can approximate servo control in one axis or another, however, by reading the current position from the camera, comparing it to the desired position, and changing the camera motor direction and speed appropriately. In most applications where the camera is mounted at approximately eye level, tilt motion is less frequent and critical than pan motion. Pan movements were therefore given priority as a servo operation in this project, and tilt commands, when necessary, were given only after the pan motion stopped. The zoom setting control, however, can operate concurrently with pan or tilt movements, and was adjusted continuously as required by the control system.
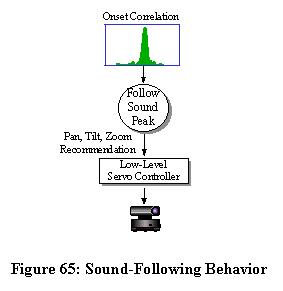
The simplest and most obvious control behavior to incorporate into a sound-enabled camera system is sound following. Given one pair of microphones, only azimuth can be localized; tilt and zoom must be preset using a priori information. It may be possible to use reverberative cues to estimate target range, but this was not attempted.
Figure 65: Sound-Following Behavior
Figure 65 illustrates the sound following behavior. With the speaker at a range of under 2.5 meters, normal speaking volumes were loud enough to escape interference from the camera motor noise during medium pan speeds. A simple behavior scheme was designed to move the camera to the azimuth corresponding to the peak of the onset correlation. Fuzzy control rules running in a time-critical thread on the PC were used for low-level servo-control to speed and slow the camera motion as appropriate for the measured position error. The onset correlation was generated from a moving two-second sample window of sound data. The cross-correlation was updated every 200 msec by subtracting the 200 msec portion of the cross-correlation sum that was generated two seconds ago, and adding the component belonging to the most recent 200 msec worth of samples. Cross-correlation windows shorter than two seconds were more responsive to movements of the speaker, but were more likely to cause unpredictable control behavior during significantly long pauses in speech. This could potentially be remedied by passing the cross-correlation output into an IIR filter, so that peaks would not disappear completely during silent periods greater than the sample window, but would instead slowly decay.
At speaker ranges greater than 2.5 meters, motor noise became a significant interference problem. Two options in camera behavior were available to remedy this: one, the camera could be allowed to move only at its slowest speed, which was the quietest, and two, the camera could use the following control sequence:
1. Sit still and listen for T seconds.
2. Disable sound input and move quickly to the peak direction detected.
3. Go to 1.
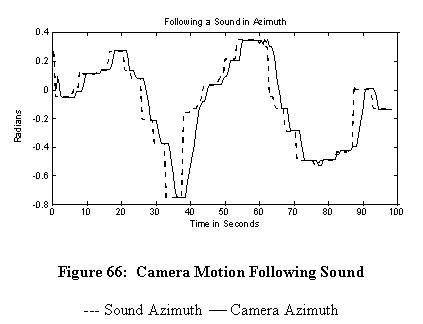
The first method is sluggish, and the second is extremely jerky. The suitability of each would depend on the intended application. Figure 66 shows the behavior of the camera controller following a sound. Note that the lag in the camera response is due primarily to the limited slew rate of the camera at its slowest speed, so as to avoid sound interference.
Figure 66: Camera Motion Following Sound
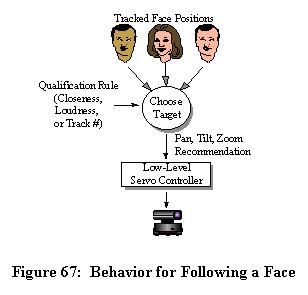
The pixel-level fusion face detection scheme described in Chapter 5 and target tracking system described in Chapter 6 make it easy for the camera to follow the face of the person speaking. The estimated position of a specific target being tracked can be used to aim the camera, with the range estimate being used to adjust the zoom. The zoom control policy was set so that the width of the face occupied approximately 20% of the width of the camera image. The decision of which target to follow may be based on a user command (e.g., clicking the mouse on one of the faces in the image) or by selecting the closest or loudest face target. Figure 67 illustrates the face following behavior.
Figure 67: Behavior for Following a Face
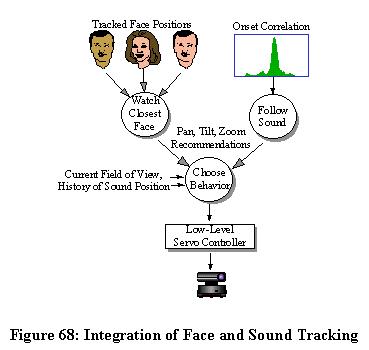
If the speaker might suddenly move out of the camera field of view, the talking-head follower could recover by incorporating the sound localization behavior for this contingency. A behavior-switching agent could detect when the loudest sound source exists outside the field of view for more than an arbitrary time limit, and switch to the sound following behavior until this circumstance has been corrected. Figure 68 shows this combination of behaviors.
Figure 68: Integration of Face and Sound Tracking
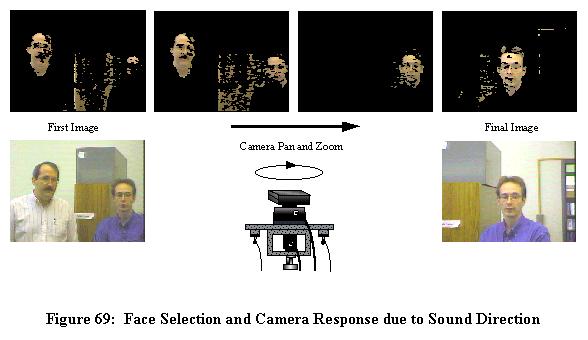
Figure 69: Face Selection and Camera Response due to Sound Direction
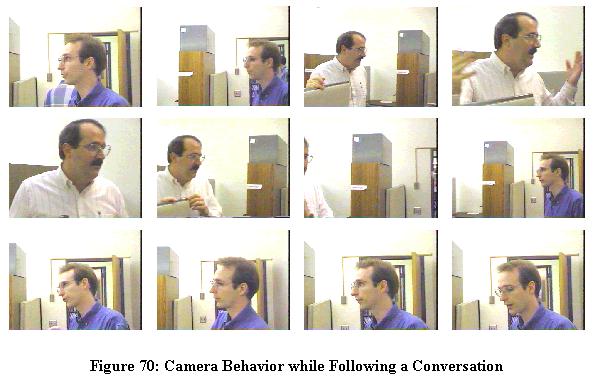
Figure 69 shows how the camera narrows in on the speaker's face. The top row of pictures show the pixel-level fusion of audiovisual data as the person on the right begins to peak. Skin-tone pixels for that speaker become stronger while other pixels of similar color become weaker and drop below the segmentation threshold. The camera controller chooses the rightmost face as the strongest target, subsequently panning over and zooming in on it. Figure 70 shows the camera following a conversation, where one speaker stops talking and the other begins. When the sound azimuth stays outside the field of view for too long, the sound following behavior takes over and pans to find the unseen speaker. When searching, the camera zooms out to cover a larger area; once the target is discovered, it zooms in again.
Figure 70: Camera Behavior while Following a Conversation
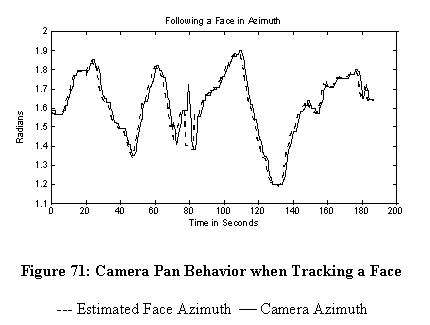
Figure 71: Camera Pan Behavior when Tracking a Face
A plot of the camera pan motion while tracking a moving, speaking face is given in Figure 71.
For tracking a person's body as they move about a room, either motion detection or background image subtraction may be used. When performing background image subtraction, a stationary camera must be used to detect objects while the active camera follows selected targets. When using image motion for active camera control, three options for sensing are available:
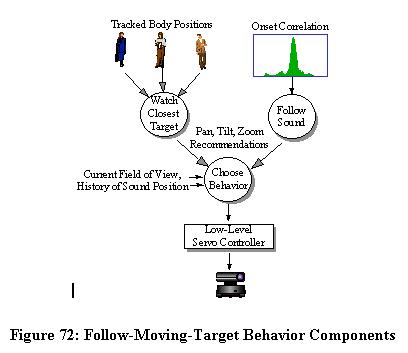
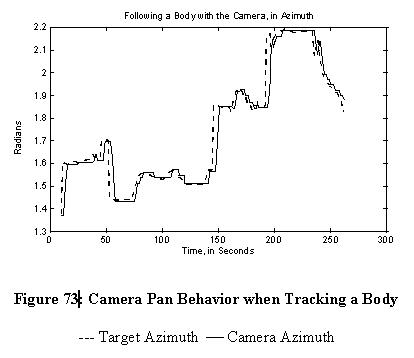
Figure 72 shows the combination of body tracking and sound following behaviors for tracking a person in a room. Targets may be chosen on the basis of recognized identity (e.g., color histogram from clothing), sound level, or proximity. Figure 73 shows the performance of a camera panning to follow a target. The target lags somewhat due to slew rate limited by acoustic noise constraints.
Figure 72: Follow-Moving-Target Behavior Components
Figure 73: Camera Pan Behavior when Tracking a Body
This chapter has presented the basic behavioral building blocks required for developing automatic camera control applications based on the sensor features described in this dissertation. The ability of the computer to actively control its vision improves its own perception of activities and allows it to provide better images to human viewers who may also consume the video content. In the next chapter, commercial applications of these features will be described.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}